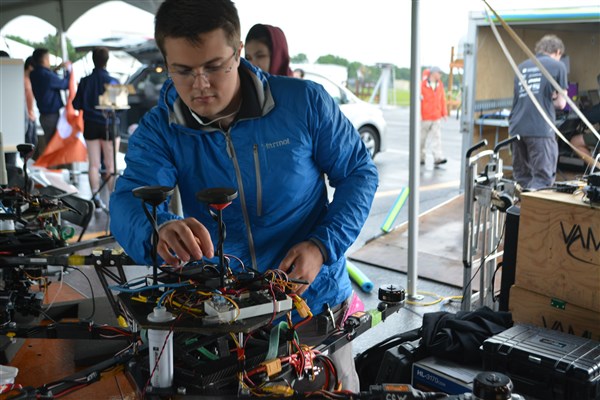
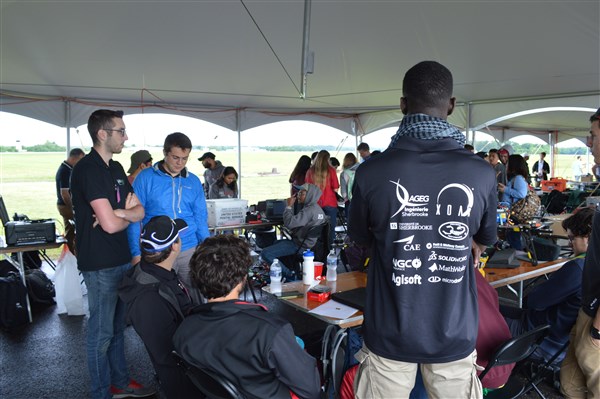
We just came back from AUVSI ! We flew on the first day and our UAV did a very good job achieving the waypoint accuracy and object detection tasks. However, we had a problem with the release mechanism of the UGV (Unmanned Ground Vehicle), the shaft did not hold on and the UGV started slowly going down. The UAV was fine, but the judges did not like it and forced us to land. We had to redo all the 3.6 miles of waypoints. We managed to take great pictures and find targets within 5 to 15 ft (thanks to our new custom-made gimbal). Lessons learned and next year we’ll do more robustness test with our winch.
We finished with a 5th place out of the 75 teams present. We are very happy with the results considering what happened and that 9 out of the 12 team members are freshman. We gained a lot of experience and had a lot of fun during our stay in Maryland, USA.
Here are the pictures taken during the competition (more are to come, I will notice you when I add them to the folder).
As for next year, we plan on building a brand new UAV. Our plan is to make it bigger and faster so we can have more autonomy and carry a heavier payload (which is what the competitions are aiming towards). I will write you when we finish our new design and choose what motors and ESCs we will use. The new ESCs you sent us are awesome, plus they look very good!
Justin Breton
Technical Director









 Follow
Follow